

 QQ
QQ
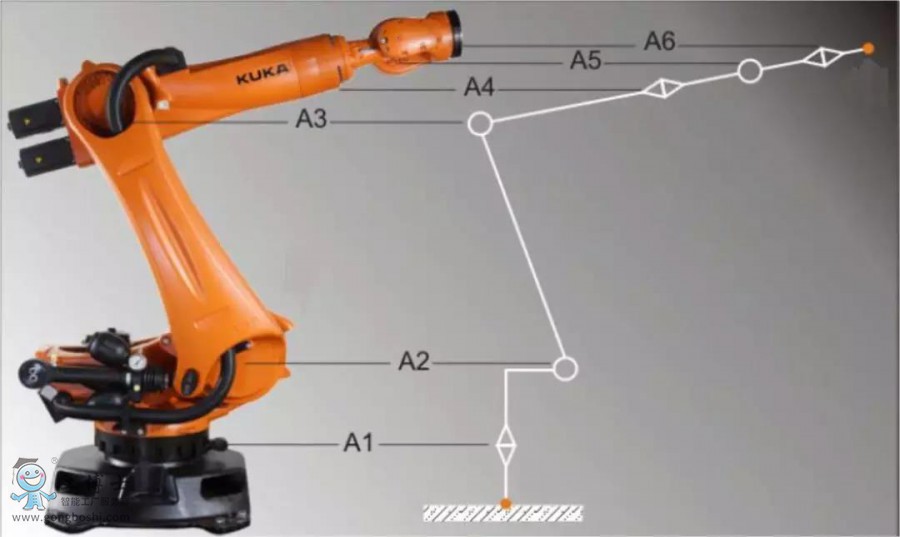
库卡机器人上的减速机
声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
机器人关节的运动,*早是从液压机构驱动开始的,经过一系列科技的发展和创新,才形成了今天我们所看到的减速机。
液压机构
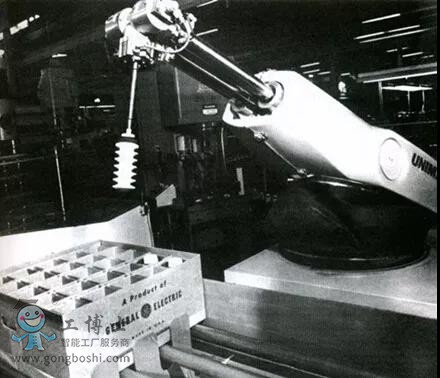
1959 年,世界上**条工业机械臂被研制出来,利用了很多液压机构来驱动机器人关节的运动。这是工业史上的一大创举,终于有一种灵活的机器可以替代人工机械式的劳动。
电动机
1973 年,KUKA 改进了工业机器人的结构,6 个关节全部用电动机控制,这使得机器人的结构更加紧凑,关节动作更加灵活,工作范围大大增加。


在制造机器人的道路上 KUKA 不断创新改良,随后,KUKA 改造了机器人的驱动结构:由电动机驱动 6 个关节,并用液压机构助力以增加负载能力,2 号和 3 号轴中加入丝杆螺母传动大大提高了重复精度。

1989 年,世界格局发生了巨大变化。有一种减速机从冷战的高墙之内解禁出来,很快被用在民用工业机器人上。负载能力与精度兼备之下,机器人结构变得十分简洁,运行非常灵活。这款神奇的减速机就是大名鼎鼎的“谐波减速机”(Harmonic Drive)。
谐波减速机的结构十分简单,是由波发生器、柔轮、刚轮三部分组成。其原理是利用柔轮与刚轮的齿数差,以及柔轮在运行时的可控形变来达到减速与传递动力的目的。
自重轻、体积小、减速比高、传动力矩大、反向间隙小、精度高、运行平滑效率高等诸多优点使得谐波减速机在上世纪 80 年代末,90 年代初被广泛使用在机器人身上。
RV 减速机
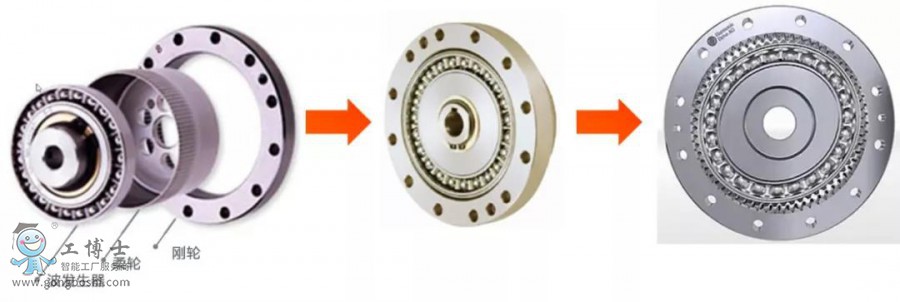
科技飞速发展,紧接着另一种减速机进入了机器人研发工程师的视线——RV 减速机(Rotary Vector Drive)。RV 减速机是行星减速机与摆线轮减速机的结合。利用行星轮轴的偏心驱动力使得摆线盘在外圈上摆动,达到减速与动力传递的目的。它既有行星减速机减速比变化范围大的特点又有摆线轮反向间隙小、传动力矩大的特点。而且体积相对较小,十分适合安装在机器人上使用。

行星减速机(左) 摆线轮减速机(中) RV 减速机(右)
划重点:
谐波减速机更轻,所以目前 KUKA 的小机器人(KR 6 Agilus, KR 10 Agilus, LBR iiwa)采用谐波减速机。
RV 减速机更耐冲击,所以 KUKA 较大体型的机器人都采用 RV 减速机。也有个别机器人身上两种都有(KR 3 Agilus)。
更多资讯:库卡机器人配件
