

 QQ
QQ
不通过程序号而选定好要运行的程序实现外部启动机器人——库卡机器人
声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
今天和大家分享一个KUKA工业机器人外部控制小技巧:不通过程序号而选定好要运行的程序实现外部启动机器人。
机器人的外部启动有以下两种方式,今天我们着重学习第二种方式来实现机器人的外部启动。
可以通过如下五个步骤来外部启动机器人:
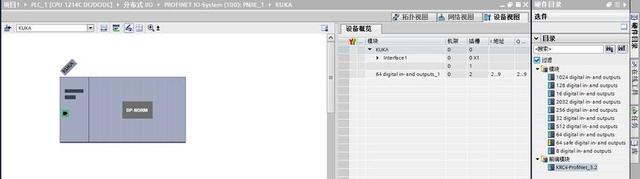
首先导入机器人的GSD文件,对plc与机器人进行阻态连接。

步骤1:在T1模式下把用户程序按控制要求插入cell.src里,选定cell.src程序,把机器人运行模式切换到EXT_AUTO.
步骤2:在机器人系统没有报错的条件下,PLC一上电就要给机器人发出 $move_enable(要一直给)信号。
步骤3:PLC给完$move_enable信号500ms后再给机器人$drivers_off(要一直给)信号。
步骤4:PLC给完$drivers_off信号500ms后再给机器人$drivers_on信号。当机器人接到$drivers_on后发出信号$peri_rdy给PLC,当PLC接到这个信号后要把$drivers_on断开。
步骤5:PLC发给机器人$ext_start(脉冲信号)就可以启动机器人。
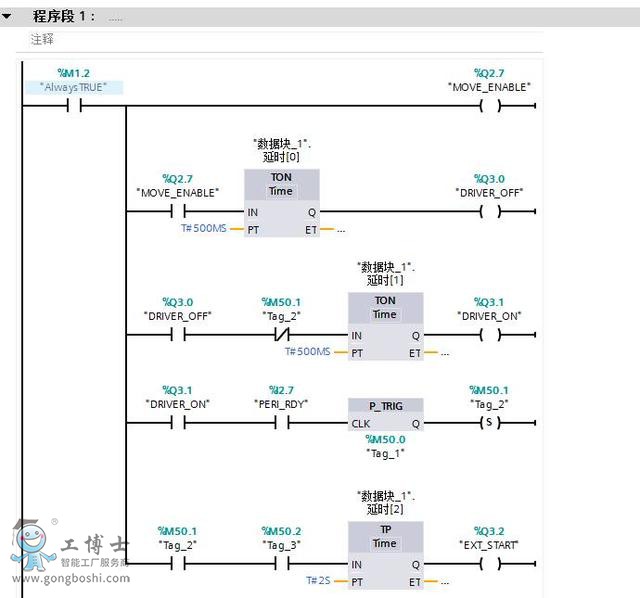
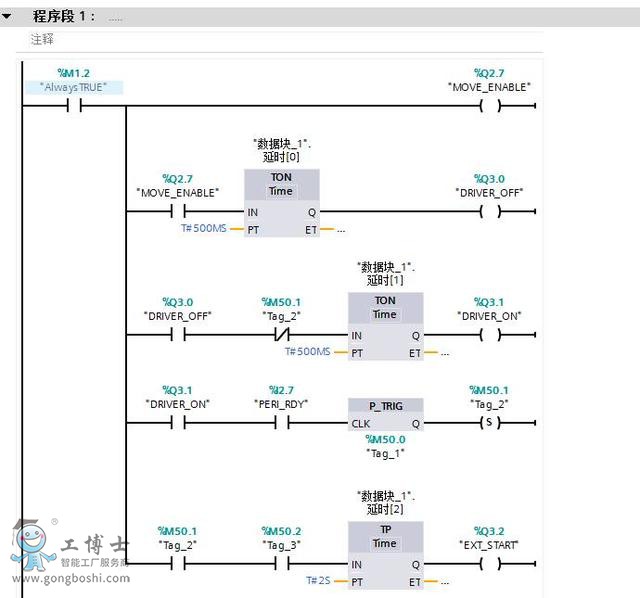 在博途软件上给PLC编写程序,实现步骤1~步骤5的时序控制,当用强制功能对M50.2置1时,机器人开始运行cell文件的程序。
在博途软件上给PLC编写程序,实现步骤1~步骤5的时序控制,当用强制功能对M50.2置1时,机器人开始运行cell文件的程序。
更多资讯:库卡机器人配件
